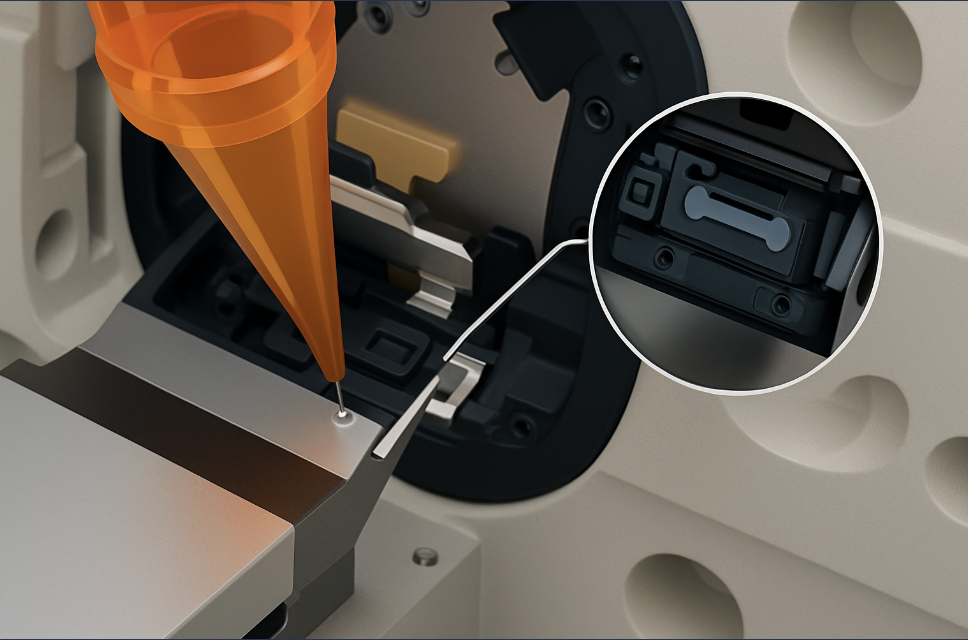
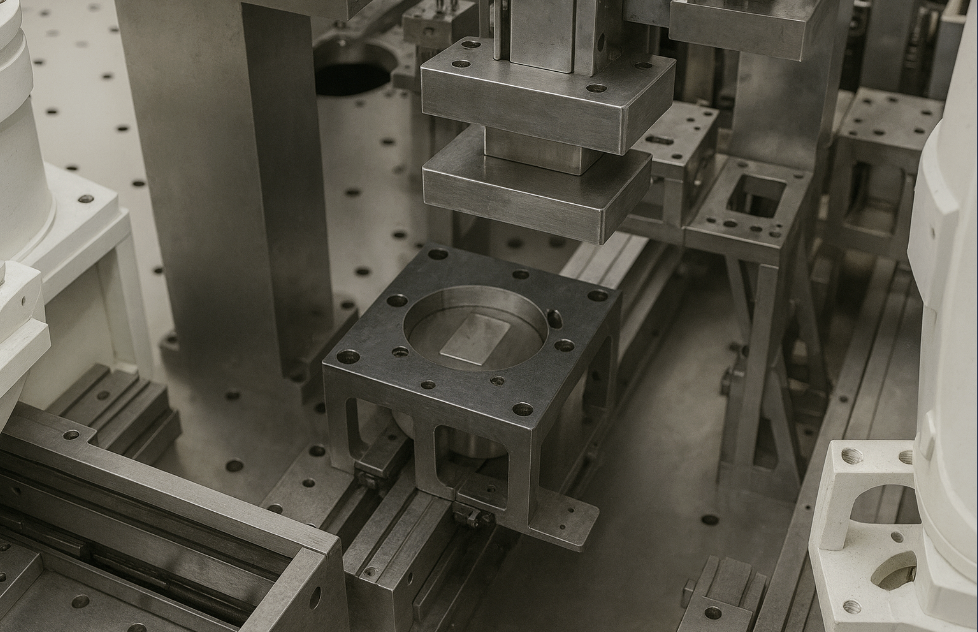
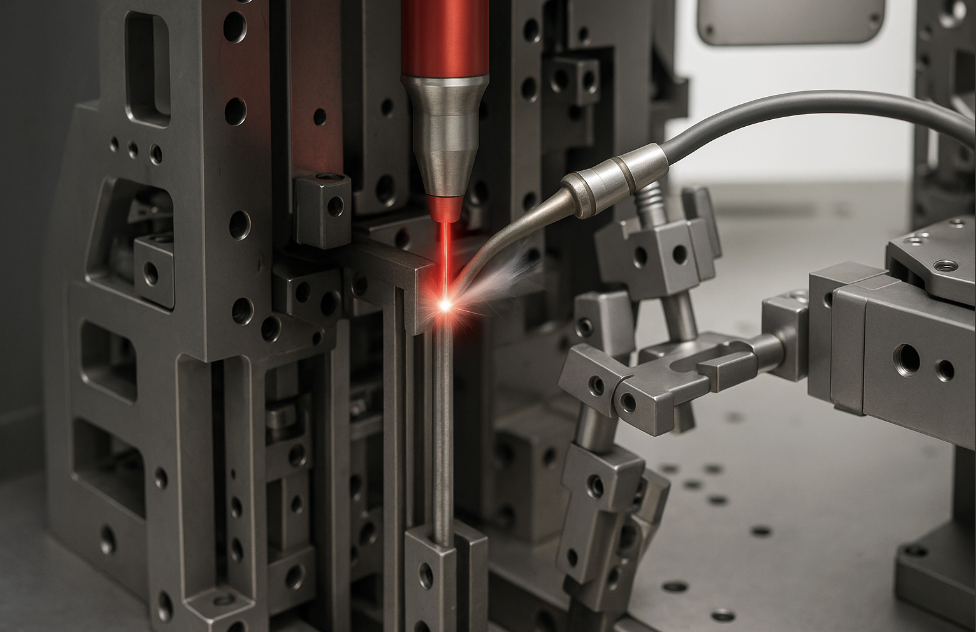
Our process automation capabilities cover a wide range of advanced manufacturing technologies, including precision dispensing, lamination and pressure-controlled assembly, screw fastening, metal laser welding, and other customized production automation solutions designed for high-precision manufacturing environments.
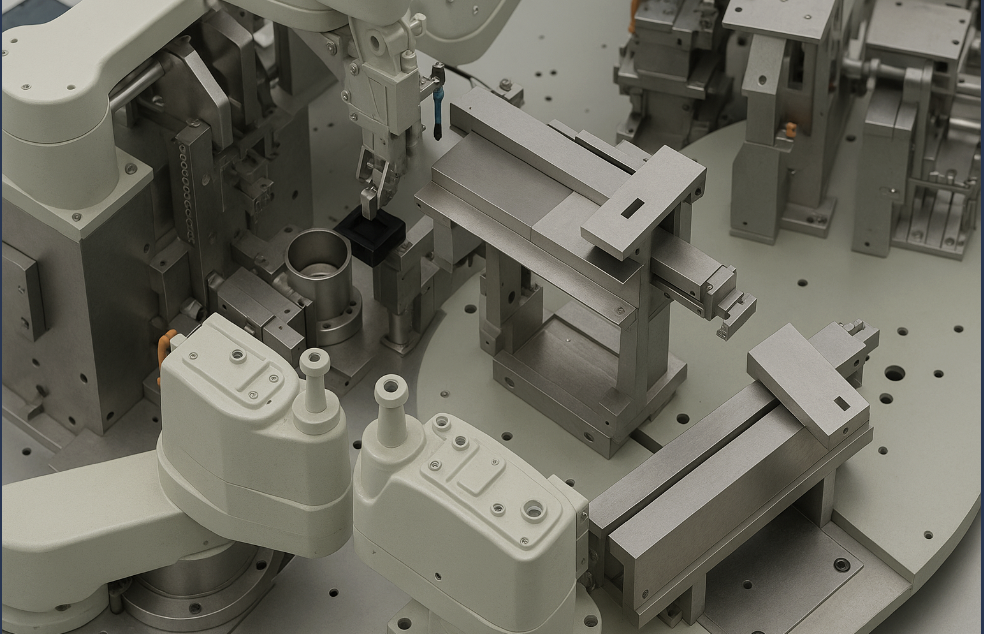
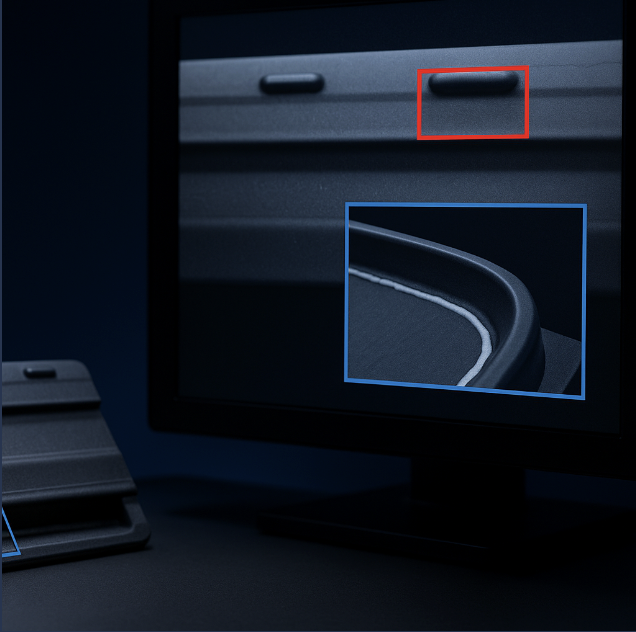
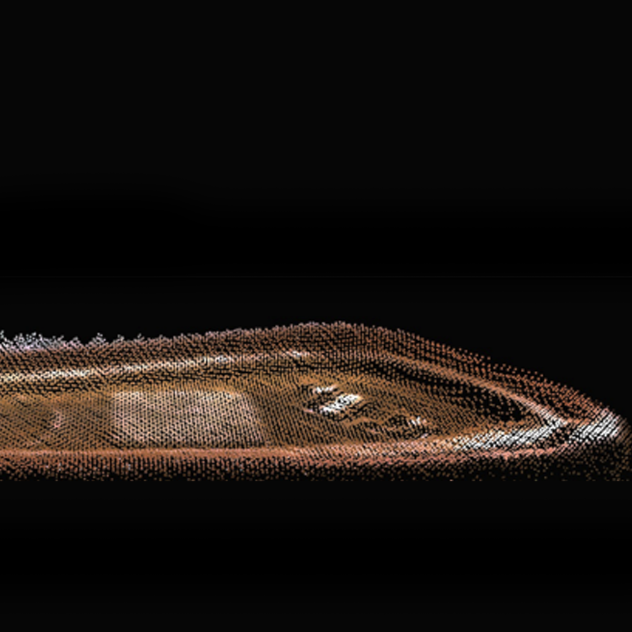
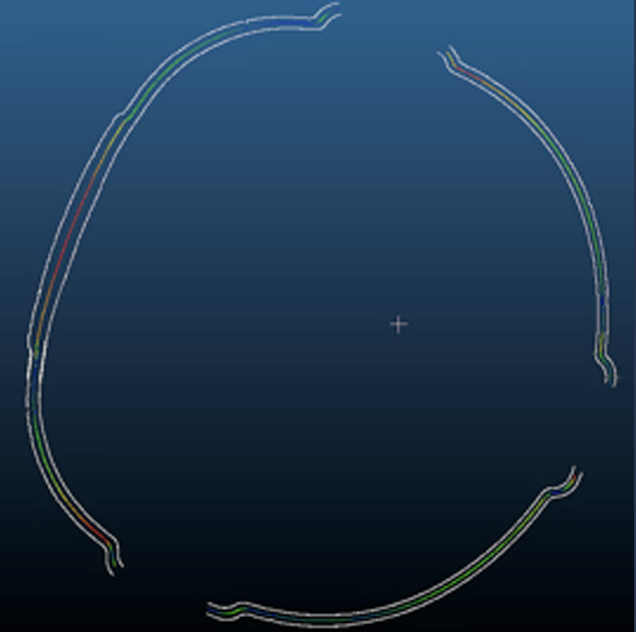
We are committed to the research and development of intelligent automated assembly technologies, with in-house integration of 2D and 3D vision-based dynamic trajectory guidance and control systems. Through continuous technological innovation and refinement, we deliver high-value engineering solutions that enhance accuracy, consistency, and scalability for our customers in the precision manufacturing industry.