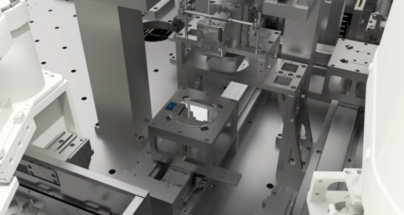
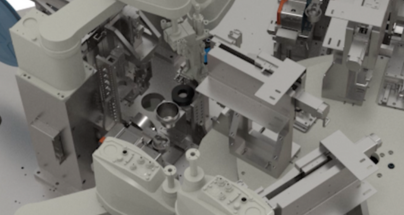
Các công nghệ xử lý có thể áp dụng bao gồm pha chế chính xác, cán màng và lắp ráp giữ áp suất, bulông định vị và hàn laser kim loại cũng như các giải pháp tự động hóa quy trình sản xuất khác.
Công ty cam kết nghiên cứu và phát triển công nghệ lắp ráp thông minh tự động, phát triển tích hợp độc lập công nghệ điều khiển quỹ đạo động không gian trực quan 2D và 3D, trong lĩnh vực công nghiệp sản xuất chính xác, thông qua cải tiến liên tục đổi mới công nghệ, để mang đến cho khách hàng giá trị dịch vụ kỹ thuật tốt hơn.
Pha chế chính xác
Có khả năng phân tán keo <10mg. Bao gồm nhiều loại LDA trên một bộ phận, hai bộ phận, keo nóng chảy, keo xử lý bằng tia cực tím và keo dán khe hở, v.v.
Cán màng/Liên kết PSA
Tập trung vào quy trình cán màng PSA và OCA, đặc biệt là các bộ phận quan trọng như mô-đun quang học và ắc quy.
Bulông định vị
Hướng dẫn trực quan tự động để bắt bulông chính xác trên các thiết bị đeo (M0.8).
Hàn laser
Quá trình hàn laser liên kết kim loại với kim loại, chủ yếu là quy trình tự động hóa sản xuất vỏ máy.
Giải pháp SW
Hệ thống động 3D
Hệ thống động 3D hoàn toàn tự động của chúng tôi sử dụng trực quan 3D để tạo dữ liệu đám mây điểm và trích xuất đường dẫn để hướng dẫn chuyển động của robot. Hệ thống này cho phép robot nhìn thấy được trong thế giới không gian 3 chiều.
Hệ thống của chúng tôi có thể bao gồm một loạt các quy trình lắp ráp, từ pha chế LDA, lấp đầy khoảng trống, bắt bulông, cắt laser, sơn bề mặt 3D và chọn đối tượng cũng như định vị và điều chỉnh hướng và xoay. Giải pháp của chúng tôi cũng bao gồm các vật liệu trong mờ và trong suốt.
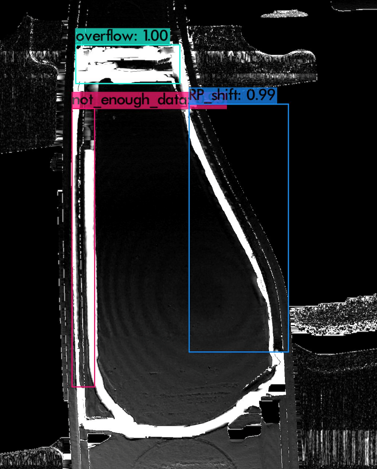
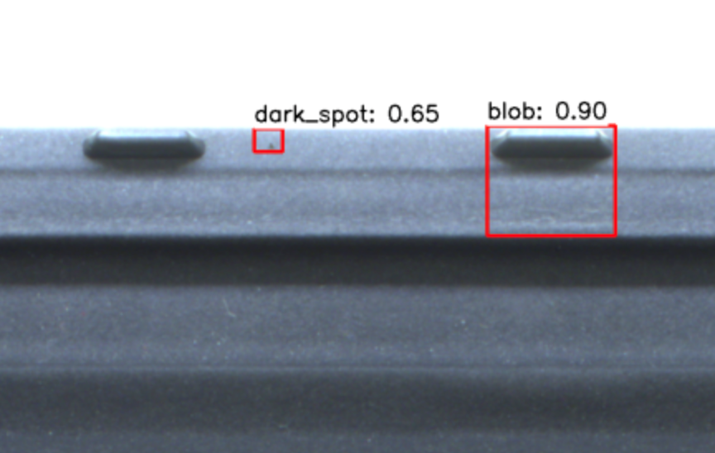
Kiểm tra bề mặt ML
Mô hình DL của chúng tôi gồm có lỗi bề mặt 2D và 3D cũng như kiểm tra đường keo 3D phức tạp hơn. Mô hình mang lại hiệu quả và độ chính xác cao.
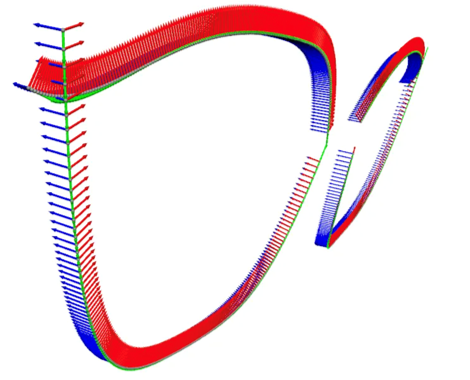
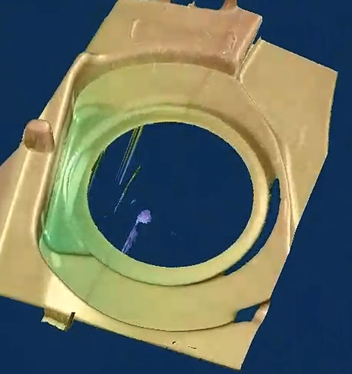
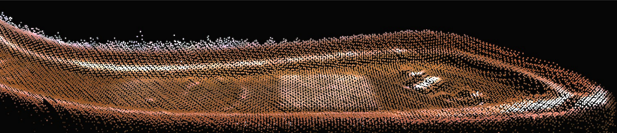
Hình ảnh đám mây điểm 3D
Dữ liệu đám mây điểm 3D được tạo bằng máy ảnh 3D có sẵn.
Sử dụng phương pháp bản địa hóa hoặc toàn cầu hóa để định hình hình học bề mặt tùy thuộc vào loại áp dụng để đáp ứng khả năng xử lý.
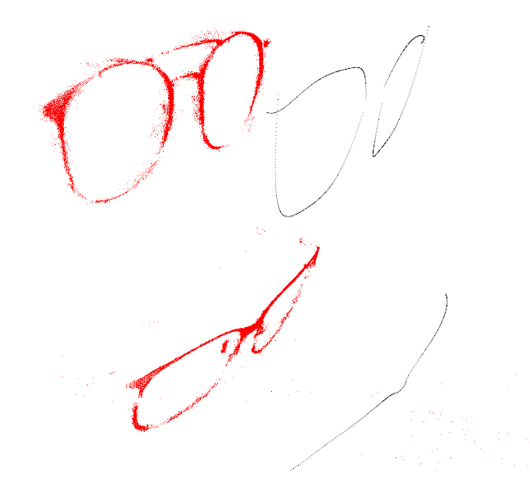
Tạo đường dẫn
Sau khi chụp dữ liệu đám mây điểm bề mặt, mô-đun thuật toán của chúng tôi sẽ thực hiện trích xuất điểm bề mặt hoặc phát hiện bên cạnh để tạo đường dẫn chuyển động. Các điểm của đường dẫn là tọa độ chuyển động theo x, y, z được cấp cho robot để xử lý chuyển động.